




Журнал о добывающей промышленности
Сайт использует cookie-файлы, чтобы сделать ваше пребывание на нем максимально удобным. К cайту подключен сервис веб-аналитики Яндекс.Метрика, использующий cookie-файлы. Оставаясь на сайте, вы даете свое согласие на обработку персональных данных в порядке, указанном в Политике обработки персональных данных.
Сокровища Посейдона:
гонка за металлами на дне океана уже началась
гонка за металлами на дне океана уже началась
Крупные компании по всему миру готовятся добывать металлы там, где человечество никогда не бывало – на дне океана. Речь идет о больших деньгах, но вместе с ними и о больших рисках. Пока мировые державы наперебой заявляют, что первыми начали добычу в пучине вод, экологи бьют тревогу – даже Луна исследована больше, чем океанские глубины.
В материале «Карьера» разбираемся, как устроена глубоководная добыча, кто на этом заработает и главное – сопоставимы ли риски с геополитическими выигрышами и суммами на счетах?
В материале «Карьера» разбираемся, как устроена глубоководная добыча, кто на этом заработает и главное – сопоставимы ли риски с геополитическими выигрышами и суммами на счетах?
Что такое добыча на дне океана?
Промышленные компании разных стран сейчас претендуют на площадь разработки морского дна в 1,5 миллиона кв.м. Только представьте: это площадь целой Монголии.
Добывать там планируют редкие металлы. Всего отрасль выделяет 3 типа месторождений на глубине.
Добывать там планируют редкие металлы. Всего отрасль выделяет 3 типа месторождений на глубине.
Ставку отрасль делает на Тихий океан. Конкрециями особенно богата зона Кларион-Клиппертон. Это в восточной части Тихого океана, между Мексикой и Гавайями. В прошлом году ученые подсчитали, что там содержится более 21 миллиарда тонн кобальта, меди, никеля и марганца.
Металлы также ищут в Северно-Ледовитом, Атлантическом и Индийском океанах.
Металлы также ищут в Северно-Ледовитом, Атлантическом и Индийском океанах.
Исследование минералов в мире

Почему именно океан?
На земле не хватает ресурсов?
На земле не хватает ресурсов?
Во всем мире растет спрос на металлы, особенно редкоземельные. Современные технологии совершенствуются каждую секунду. Закон простой: прогресс невозможен без ресурса. Для электроники, «зеленой» энергетики и высокотехнологичных отраслей нужны металлы. Без них нельзя производить смартфоны и аккумуляторы, строить корабли и самолеты.
Простой пример. Всего через 25 лет спрос на кобальт и никель будет в 4 раза выше, чем объем месторождений на суше. Такую оценку приводит Всемирный банк. По данным регулятора, к 2050 году в мире должны добывать на 500% больше кобальта, чем сейчас для достижения целей Парижского соглашения🔗.
Простой пример. Всего через 25 лет спрос на кобальт и никель будет в 4 раза выше, чем объем месторождений на суше. Такую оценку приводит Всемирный банк. По данным регулятора, к 2050 году в мире должны добывать на 500% больше кобальта, чем сейчас для достижения целей Парижского соглашения🔗.
В 2015 году страны заключили Парижское соглашение по климату. Кобальт, медь и другие металлы не являются прямым объектом документа, но их добыча напрямую связана с важной целью международного соглашения – переходом к низкоуглеродной экономике и экологически чистым технологиям.

Аналитики рынка справедливо отмечают: мы можем оценить только текущий темп развития и необходимость ресурсов. Но в современном мире, где стремительно развивается ИИ и центры обработки данных, через 10 лет потребность в металлах может возрасти еще выше оценок, и значительно.
Кто добывает на дне океана?
Сейчас в гонку за ресурсы морского дна вступают Япония, США, Индия, Норвегия и Россия. Одни державы хотят нарастить ВВП за счет новых ресурсов, другие показать преимущество в отрасли. Глобально – это борьба за контроль и влияние на мировой карте.
Геополитические причины у всех свои, но есть и общая мотивация. Она стара как мир. Это деньги.
Например, Япония одной из первых стран в мире заходит в гонку глубоководной добычи, чтобы снизить зависимость от импорта из Китая. На долю Поднебесной приходится около 70% мировой (!) добычи редкоземов.
В январе 2026 года Япония первой в мире запустила эксперимент по добыче редкоземельных металлов в океане. Власти инвестировали в проект около 250 миллионов долларов. Экспедицию судна Chikyu направили к острову Минамитори в Тихом океане, чтобы проверить – можно ли непрерывно извлекать сырье с экстремальной глубины. Если испытания пройдут успешно, то полномасштабную добычу начнут в 2027.
Китай еще 2 года назад получил несколько десятков разрешений на разведку глубоководных месторождений. Индия планирует изучать дно в Тихом океане – в 2024 году индийцы подали заявку на работу на двух участках.
Лицензия на разведку есть и у России. В 2026 году продлили заявку российской компании «Южморгеология» в зоне Кларион-Клиппертон до 2031 года . За фирмой закреплено больше 75 тысяч квадратных метров зоны.
Геополитические причины у всех свои, но есть и общая мотивация. Она стара как мир. Это деньги.
Например, Япония одной из первых стран в мире заходит в гонку глубоководной добычи, чтобы снизить зависимость от импорта из Китая. На долю Поднебесной приходится около 70% мировой (!) добычи редкоземов.
В январе 2026 года Япония первой в мире запустила эксперимент по добыче редкоземельных металлов в океане. Власти инвестировали в проект около 250 миллионов долларов. Экспедицию судна Chikyu направили к острову Минамитори в Тихом океане, чтобы проверить – можно ли непрерывно извлекать сырье с экстремальной глубины. Если испытания пройдут успешно, то полномасштабную добычу начнут в 2027.
Китай еще 2 года назад получил несколько десятков разрешений на разведку глубоководных месторождений. Индия планирует изучать дно в Тихом океане – в 2024 году индийцы подали заявку на работу на двух участках.
Лицензия на разведку есть и у России. В 2026 году продлили заявку российской компании «Южморгеология» в зоне Кларион-Клиппертон до 2031 года . За фирмой закреплено больше 75 тысяч квадратных метров зоны.

Тихий океан
Источник: Damsea / Shutterstock / FOTODOM
Источник: Damsea / Shutterstock / FOTODOM
В 2024 году российские геологи по контракту с Минприродных ресурсов провели длительную разведку на дне Арктического океана. Целью миссии стал поиск месторождений. Геологи 5 месяцев сменяли друг друга на круглосуточных вахтах, и метр за метром исследовали дно.
В гонку вступает и США. Там не просто получают лицензии на глубоководную добычу, но и уже планируют к 2029 году построить завод для переработки важнейших минералов, добываемых со дна Тихого океана.
В гонку вступает и США. Там не просто получают лицензии на глубоководную добычу, но и уже планируют к 2029 году построить завод для переработки важнейших минералов, добываемых со дна Тихого океана.
Кто диктует правила игры на глубине?
Глубоководную добычу регулируют на мировом уровне. Чтобы начать разведку и добычу в океане, любой стране нужно получить контракт в Международным органе по морскому дну (ISA). Всего с 2001 года выдали 31 лицензию на разработку – как государствам, так и частным компаниям.
Полноценная добыча на дне еще не началась, но новая редкоземельная «лихорадка» уже захватывает мир. Сейчас США пытается ускорить выдачу разрешений и обойти международные правила.
В январе 2026 года Америка внесла изменения в правила Национального управления океанических и атмосферных исследований. По новой поправке, США могут подавать заявки одновременно и на разведку, и на добычу, а также самостоятельно регулировать деятельность американских компаний в международных водах.
Полноценная добыча на дне еще не началась, но новая редкоземельная «лихорадка» уже захватывает мир. Сейчас США пытается ускорить выдачу разрешений и обойти международные правила.
В январе 2026 года Америка внесла изменения в правила Национального управления океанических и атмосферных исследований. По новой поправке, США могут подавать заявки одновременно и на разведку, и на добычу, а также самостоятельно регулировать деятельность американских компаний в международных водах.
Глубоководная добыча полезных ископаемых имеет ключевое значение для освоения внутреннего источника критически важных минералов для Соединенных Штатов.
Нил Джейкобс
глава Национального управления океанических и атмосферных исследований США
Эксперты отмечают: это напрямую противоречит роли Международного органа по морскому дну.
Интересен формирующийся прецедент, связанный с “американским способом ведения международного бизнеса” – полное игнорирование международных договоренностей и насаждение собственного мнения, на правах силы и угроз. На мой взгляд, это опрометчивый и опасный прецедент, который может дестабилизировать всю систему глобального управления океаном: экосистемы глубоководья изучены крайне слабо, а их восстановление после добычи займет сотни и тысячи, а может быть, и миллионы (!) лет.
Иван Подлипский
кандидат геолого-минералогических наук, доцент кафедры прикладной экологии Биологического факультета СПбГУ
Без шахт и карьеров.
Как технически устроена добыча в океане?
Как технически устроена добыча в океане?
Пока страны публично не описывают процесс глубоководной добычи в деталях, но основные технологии все же известны.
Например, в 2022 году тестовый робот Eureka 1 успешно завершил первые испытания по выборочной добыче редкоземельных металлов под водой. Глубина была небольшой – 25 метров.
Например, в 2022 году тестовый робот Eureka 1 успешно завершил первые испытания по выборочной добыче редкоземельных металлов под водой. Глубина была небольшой – 25 метров.

Робот осторожно собрал полезные ископаемы с морского дна
Источник: nplus1.ru
Источник: nplus1.ru
Робота разработали в Америке. По задумке производителей, он должен дислоцироваться с корабля, погрузиться на дно и осторожно собрать конкреции манипулятором с помощью машинного зрения, не касаясь дна. Далее робот возвращается на поверхность для разгрузки. Испытания прошли успешно, крупномасштабно развернуть технологию инженеры планируют уже в этом году.
Еще одного робота испытали в Китае в ноябре 2025 года. По сообщению газеты South China Morning Post, тесты прошли в западной части Тихого океана на глубине 2 тысячи метров. Как заявили разработчики, робот перемещался по морскому дну, усеянному кобальтоносными корками, и регулировал свое положение, чтобы избежать опрокидывания и застревания.
Доктор геолого-минералогических наук Владимир Макаров объясняет: разработку технологий добычи с глубины океана сейчас активно ведут в странах с высокотехнологичной экономикой, ограниченными минеральными ресурсами и высокими потребностями. Это Китай, Индия, Япония, США и Канада.
Технологию глубоководной добычи описывает геолог Иван Подлипский – на глубине минеральные отложения вместе с верхним слоем дна может собирать и специальный гусеничный транспорт.
Еще одного робота испытали в Китае в ноябре 2025 года. По сообщению газеты South China Morning Post, тесты прошли в западной части Тихого океана на глубине 2 тысячи метров. Как заявили разработчики, робот перемещался по морскому дну, усеянному кобальтоносными корками, и регулировал свое положение, чтобы избежать опрокидывания и застревания.
Доктор геолого-минералогических наук Владимир Макаров объясняет: разработку технологий добычи с глубины океана сейчас активно ведут в странах с высокотехнологичной экономикой, ограниченными минеральными ресурсами и высокими потребностями. Это Китай, Индия, Япония, США и Канада.
Технологию глубоководной добычи описывает геолог Иван Подлипский – на глубине минеральные отложения вместе с верхним слоем дна может собирать и специальный гусеничный транспорт.
Собранные материалы затем перекачиваются по трубам на надводное судно для переработки. Любые отходы, такие как отложения и другие органические материалы, сбрасываются обратно в воду, либо фракционирование может проводится на уровне дна.
Иван Подлипский
кандидат геолого-минералогических наук, доцент кафедры прикладной экологии Биологического факультета СПбГУ

Японские исследователи обнаружили более 230 миллионов тонн редкоземельных металлов, стоимость которых составляет 24,8 миллиарда евро.
Источник: Centre for Deep Sea Research (UiB)
Источник: Centre for Deep Sea Research (UiB)
Доктор геолого-минералогических наук Владимир Макаров подчеркивает: извлекать со дна конкреции и кобальтовые корки индустрия может с помощью драг. Это комплексно-механизированный агрегат на плавучей платформе. Он работает по принципу цепного экскаватора, у которого много ковшей.

Фото: Akbizmag.com
Многочерпаковые драги имеют черпаки для захвата добываемой массы. Они закреплены на бесконечной цепи на раме, опускаемой под воду. Кроме того, на драге есть обогатительная установка, конвейеры и трубопроводы для удаления пустой породы. Они ведут добычу на глубинах до 60 метров.
Владимир Макаров
Заведующий кафедрой геологии месторождений и методики разведки СФУ
Разные виды драг работают на разных глубинах. Например, грейферные могут добывать на глубине до 250 метров, драглайновые – до 1500 метров, а гидравлические – до 4500 метров.
Эксперты подчеркивают: работа на дне океана – это экстремальные испытания для техники. Только представьте: роботизированные комплексы должны работать при давлении в 600 раз больше, чем на поверхности, в холоде и полной темноте.
Эксперты подчеркивают: работа на дне океана – это экстремальные испытания для техники. Только представьте: роботизированные комплексы должны работать при давлении в 600 раз больше, чем на поверхности, в холоде и полной темноте.
Для защиты электроники используют сверхпрочные сплавы и специальные корпуса, выдерживающие колоссальное давление. Роботы оснащены сложными системами автономной навигации для передвижения по крайне неровному рельефу. Они используют AI-алгоритмы для анализа подводного ландшафта в реальном времени.
Владимир Макаров
Заведующий кафедрой геологии месторождений и методики разведки СФУ
Сколько страны смогут на этом заработать?
В 2025 году весь рынок глубоководной добычи оценивали примерно в 23 млрд долларов. По данным экспертов, к 2035 году эта сумма может вырасти до 51 млрд долларов, ведь спрос на редкие минералы и металлы в мире увеличивается из-за быстрого развития технологий.

Чтобы лучше представить масштаб цифр: потенциальная прибыль к 2035 году – 51 млрд долларов – это выше, чем ВВП Грузии или Латвии. Впрочем, в сообществе звучат и более высокие оценки рынка глубоководной добычи. Так, издание The Epoch Times сообщает о сумме в 20 трлн долларов, но эти оценки многие называют заоблачными.
Как бы то ни было, пока точно известна не прибыль, а объем вложений в развитие глубоководной добычи. Например, Япония уже выделила на разработку технологий и проведение исследований около 250 млн долларов. В США планируют построить центр для переработки поднятых из глубин металлов. Проект обойдется в 500 млн долларов.
Как бы то ни было, пока точно известна не прибыль, а объем вложений в развитие глубоководной добычи. Например, Япония уже выделила на разработку технологий и проведение исследований около 250 млн долларов. В США планируют построить центр для переработки поднятых из глубин металлов. Проект обойдется в 500 млн долларов.
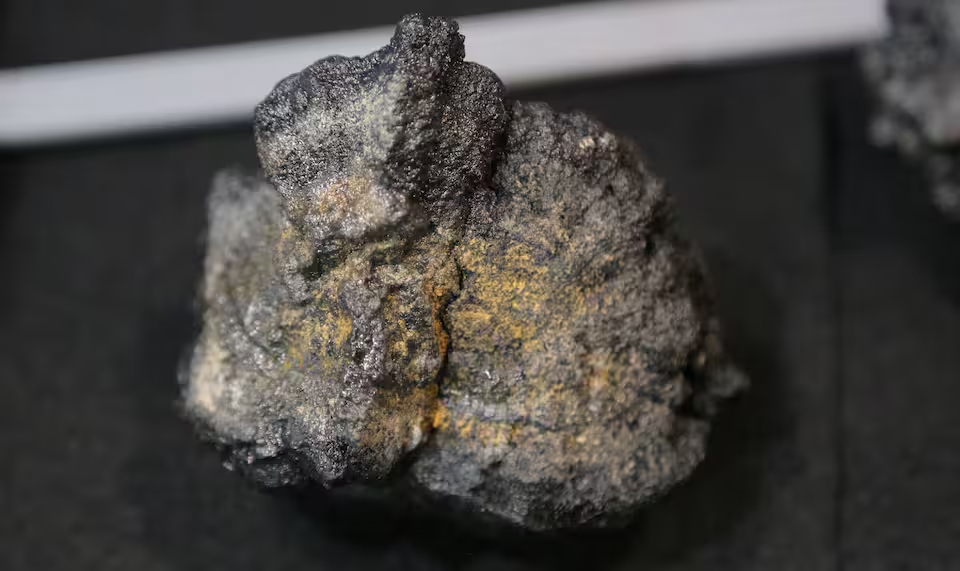
Фото: REUTERS/Chris Helgren
«Остановитесь».
Даже Луна изучена больше, чем дно океана
Даже Луна изучена больше, чем дно океана
И пока одна часть мирового сообщества рвется в бой глубоководной добычи, другая буквально кричит и просит остановиться.
Сразу несколько десятков стран в декабре 2025 года призвали запретить добычу металлов на глубине. Среди тех, кто против – тихоокеанские островные государства, а также европейские державы – Франция, Германия, Великобритания.
Ученые открыто заявляют, что морское дно мало изучено, а нанести непоправимый урон экологии в погоне за большими деньгами очень легко. Экологи уверены – нельзя начинать добычу, пока ученые не просчитают все риски.
Сразу несколько десятков стран в декабре 2025 года призвали запретить добычу металлов на глубине. Среди тех, кто против – тихоокеанские островные государства, а также европейские державы – Франция, Германия, Великобритания.
Ученые открыто заявляют, что морское дно мало изучено, а нанести непоправимый урон экологии в погоне за большими деньгами очень легко. Экологи уверены – нельзя начинать добычу, пока ученые не просчитают все риски.
У нас есть более точные карты Марса и Венеры, чем 52% территории нашей страны, которая находится под водой в пределах наших исключительных экономических зон.
Роберт Баллард
американский океанолог, который руководил поиском затонувшего «Титаника» в 80-х
Геолог и доцент кафедры прикладной экологии СПбГУ Иван Подлипский объясняет: глубоководная добыча может уничтожить среду обитания:
Конкреции служат субстратом для множества организмов (губок, кораллов, актиний и др.). Их удаление разрушает места обитания и может привести к исчезновению некоторых видов. Также в процессе добычи поднимается взвесь, которая может оседать на больших расстояниях от места добычи и забивать жабры и фильтрующие аппараты организмов, питающихся поверхностными отложениями и взвесью.
Иван Подлипский
кандидат геолого-минералогических наук, доцент кафедры прикладной экологии Биологического факультета СПбГУ
Более того, шум и свет от оборудования могут быть опасными для морских обитателей. Среди ученых есть мнение, что добыча истощит запасы кислорода на дне. В июне 2024 года Шотландская ассоциация морских наук опубликовала статью Metallic Nodules Create Oxygen in the Ocean’s Abyss. В тексте говорится: если со дна поднять законсервированное органическое вещество, то оно включится в цепь разложения. По мнению ученых, из-за этого сначала локально снизится уровень кислорода, а в будущем может пострадать вся экосистема.
Некоторые эксперты напоминают: на самом деле любое горное производство воздействует на окружающую среду. Вот какой пример приводит геолог Владимир Макаров:
Некоторые эксперты напоминают: на самом деле любое горное производство воздействует на окружающую среду. Вот какой пример приводит геолог Владимир Макаров:
Не думаю, что вред при подводной разработке будет более масштабным, чем воздействие современных извержений подводных вулканов или излияние современных гидротерм с высокими концентрациями тяжелых металлов. Купаясь на курортах Красного моря, многие люди не подозревают, что в центральной его части в зоне Красноморского рифта, во впадине Атлантис II изливаются современные гидротермы с высоким содержанием тяжелых (цветных) металлов. Но все они прекрасно накапливаются в илистых отложениях, формируя современное месторождение, которое, очевидно, в ближайшей перспективе будет отрабатываться
Владимир Макаров
Заведующий кафедрой геологии месторождений и методики разведки СФУ
По его мнению, подводная добыча находится в начале пути, и влияние на экологию нужно оценивать. Однако геолог считает: это воздействие вряд ли будет более масштабным, чем при аналогичном производстве на суше.
Огромная прибыль или экологическая катастрофа?
Ясно одно: сейчас индустрия расколота. Ученые и промышленники спорят, что скрывает за собой добыча на глубине – мировой прорыв или фатальный провал. Но и те, и другие уверены – необходимо изучить дно океана и создать подробную карту. Это можно сделать с помощью работы дорогостоящих автономных картографических дронов.
Потенциально глубоководная добыча может закрыть потребность мира в металлах на десятки лет вперед и принести тому, кто сумеет первым отстроить добычу, огромные деньги. Но весь процесс сопряжен с большим риском для экологии. Человечество упирается в потолок ресурсов и пробует идти туда, где нет индустрии и четких правил.
Глубоководную добычу эксперты уже называют проверкой зрелости для мировой ресурсной политики. Растущий спрос подталкивает мир к освоению новых источников, но сможет ли сообщество создать индустрию с понятными правилами и опорой на науку?
Потенциально глубоководная добыча может закрыть потребность мира в металлах на десятки лет вперед и принести тому, кто сумеет первым отстроить добычу, огромные деньги. Но весь процесс сопряжен с большим риском для экологии. Человечество упирается в потолок ресурсов и пробует идти туда, где нет индустрии и четких правил.
Глубоководную добычу эксперты уже называют проверкой зрелости для мировой ресурсной политики. Растущий спрос подталкивает мир к освоению новых источников, но сможет ли сообщество создать индустрию с понятными правилами и опорой на науку?
Автор материала:
Анастасия Харужа
Анастасия Харужа
